




The SASP Deception Detect is a feature in Electronic Warfare. It is implemented in the SkyRadar FreeScopes Training Suite, developed by SkyRadar, building on the foundation of the Enhanced Kalman Disturbance Filter (EKDF).
Designed for radar systems, it excels in detecting and handling range deception data, even in noisy environments. This advancement is achieved by incorporating the Savitzky-Golay and Median Filters as the initial step in the processing chain. SASP Deception Detect comprises several subfunctions, each with a specific role in processing incoming radar reflections to identify and manage potential range-deceived targets.
Subfunctions
1. Savitzky-Golay and Median Filters
Description: The combination of Savitzky-Golay and Median Filters serves as the first step in the SASP
Deception Detect. These filters enhance signal quality by smoothing data and reducing noise, making
subsequent processing steps more robust.
Function:
- Signal Smoothing: The Savitzky-Golay filter smooths the radar signal by fitting successive
subsets of adjacent data points with a polynomial. This process preserves the essential shape
and features of the signal while reducing random noise.
- Noise Reduction: The Median filter reduces noise by replacing each data point with the median
value of neighboring points. This approach effectively removes outliers and spikes, which are
common in noisy radar data.
Use: To improve the quality of radar data by reducing noise and preserving important signal features,
thus enhancing the accuracy of subsequent processing steps.
2. Associate Radar Reflections into Objects in Noisy Environments Based on Statistical
Signal Features
Description: This subfunction groups radar reflections from a single target in noisy environments by
leveraging statistical signal features to create objects with specific distance and angle information.
Function: Identifies and associates reflections originating from a single target by analyzing their
statistical characteristics and leveraging signal features to distinguish between real targets and noise.
Use: To establish individual objects representing targets, facilitating further tracking and analysis in.
3. Velocity Gating
Description: The Velocity Gating builds upon the core functionality by introducing the capability to
create new objects or associate incoming radar echoes with existing ones based on their velocities.
Function: By comparing the velocities of radar echoes with a user-defined threshold velocity, this
enhancement enables radar systems to dynamically adapt to various scenarios and target velocities. It
facilitates the creation of new tracks or the association of echoes with existing tracks, enhancing target
tracking and management capabilities.
Use: Incoming radar echoes undergo velocity comparison against the predefined threshold velocity.
Echoes meeting the criteria are either assigned to existing tracks or used to initiate new tracks, based
on user-defined rules and algorithms.
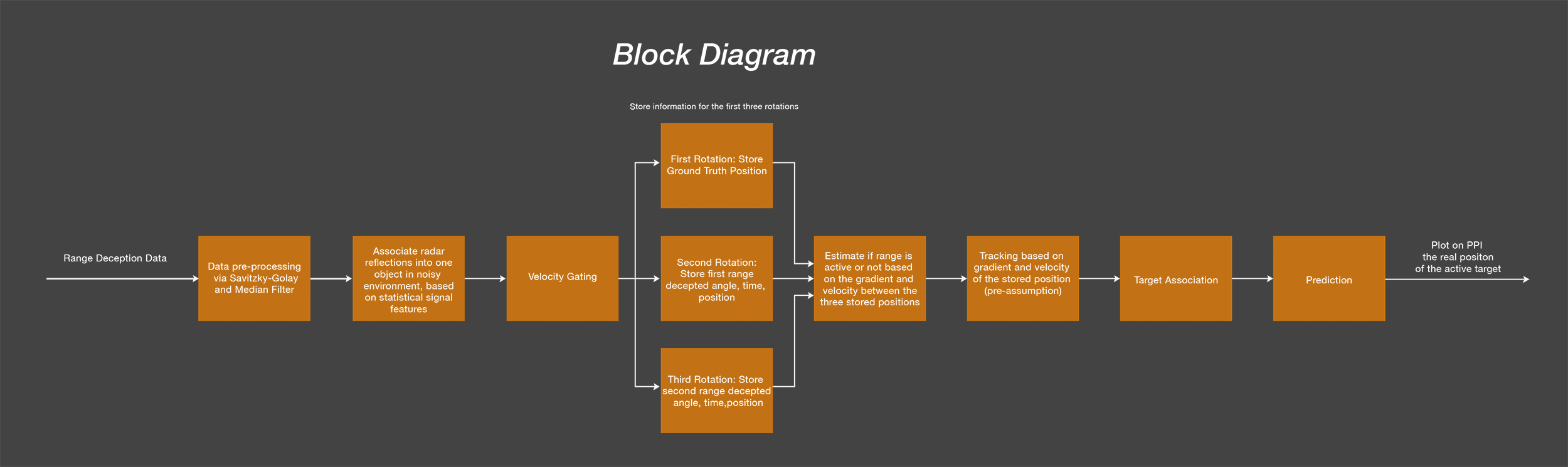
4. Store Information for the First Three Rotations
Description: This subfunction stores target information for the first three rotations of radar data.
Function: It keeps track of the information for the real target, followed by two additional sets of target
information from range-deceived targets with shifted distances.
Use: To enable the comparison of target information across rotations and detect potential deception
based on differences in data.
5. Detect If Deception Is Active
Description: The Detect If Deception Is Active subfunction monitors the gradient between target
information from the first and second rotations, as well as the second and third rotations.
Function: It evaluates the differences in distance, velocity, and angle information between these target
sets and checks if the gradient falls outside an expected range, indicating the presence of deception.
Use: To identify whether a deception attempt is in progress based on anomalous changes in target
characteristics.
6. Estimate and Track the Real Position
Description: This subfunction estimates and tracks the real position of a target by leveraging the
gradient, distance, velocity, and angle information.
Function: It calculates the position update for the real target, differentiating it from the range-deceived
targets.
Use: To determine and continuously track the actual position of a target amidst deception attempts,
enabling reliable tracking and threat assessment.
7. Target Association
Description: The Target Association Algorithm is a crucial sub-feature employed in radar systems for
tracking moving targets by associating current radar measurements with previous target information.
This algorithm utilizes a combination of parameters such as distance, angle, velocity, elapsed time, and
radar iteration to establish the most probable association between successive radar updates and
existing target data. By comparing these parameters and calculating a score, the algorithm determines
the optimal association, ensuring accurate and consistent target tracking.
Function: The primary function of the Target Association Algorithm is to match current radar
measurements with stored target information based on various parameters:
- Distance: Measures the spatial separation between the radar measurement and the existing
target position.
- Angle: Determines the angular deviation between the radar measurement and the target's
direction of motion.
- Velocity: Compares the velocity of the radar measurement with the expected velocity based
on previous target information.
- Elapsed Time: Calculates the time elapsed between successive radar updates, providing
temporal context for target tracking.
- Elapsed Radar Iteration: Tracks the number of radar iterations since the last update, indicating
the freshness of the target information.
Use: Using these parameters, the algorithm computes a score for each potential association, with a
lower score indicating a stronger likelihood of a valid match. By iteratively evaluating and updating
associations, the algorithm ensures robust and accurate target tracking across changing radar
conditions and target dynamics.
8. Prediction
Description: The Prediction sub feature is an integral component of radar signal processing algorithms,
designed to address challenges associated with close-moving targets. In scenarios where reflections
from multiple targets may be incorrectly associated or merged into a single target, the Prediction sub
feature aids in accurately predicting the presence of multiple targets. By leveraging predictive
modelling techniques, this sub feature enhances the radar's ability to differentiate and track distinct
targets, improving overall target detection and tracking performance.
Function: The primary functionality of the Prediction sub feature can be outlined as follows:
- Predictive Modelling: The Prediction sub feature utilizes predictive modelling techniques to
forecast the future positions and trajectories of targets based on their current state and known
dynamics. This predictive model accounts for factors such as target velocity, acceleration, and
maneuvering behavior.
- Gate Creation: Based on the predicted target trajectories, the Prediction sub feature
establishes prediction gates around each target's expected position. These gates define
regions within which future radar measurements are expected to fall if the predicted
trajectories hold true.
- Target Update Creation: When a new radar measurement update is received, the Prediction
sub feature evaluates whether it falls within the prediction gates of any existing targets. If a
measurement update falls within the prediction gate of a target, it is used to partially confirm
the presence of that target. If a measurement update falls within the prediction gates of
multiple targets, indicating the potential presence of multiple targets in close proximity, the
Prediction sub feature generates separate target updates for each predicted target. These
updates are then further refined and confirmed through subsequent measurements.
Use: It assists in accurately tracking target movements, particularly in congested spaces where close-
proximity targets may pose challenges for target association and tracking.
Watch the Video
Many Applications for Electronic Warfare
Follow our blogs and videos on Electronic Warfare with SkyRadar's Disturbance Filtering & Analysis solutions, the jammers and the Pulse Radar! SkyRadar is the only provider world-wide, providing manufacturer-agnostic ECM and ECCM training with simulators and real radars and jammers. Learn more about the simulator, range deception, angle deception, speed deception, radar lock on and major state of the art defense algorithms against malicious attacks.
Such defense is not only useful in a military context but also in a civil aviation setting. Increasingly speed radar jammers by trucks and cars disturb airport infrastructure. Also hybrid warfare is used to perturb critical infrastructure like airports and civil air surveillance and navigation services.
Please note that all delivery is subject to the EU export regulations. Also this blog publication and video do not share classified information.

Conclusion
The SASP Deception Detect represents a significant advancement in radar data processing, particularly
in noisy environments. By incorporating the Savitzky-Golay and Median Filters, statistical signal
features for object association, and other enhanced features, it improves upon the Enhanced Kalman
Disturbance Filter. The new system excels in velocity gating, target association, and predictive analysis,
elevating target detection and tracking capabilities while setting a new standard for jamming detection
in radar technology.






